SeaSearcher (Senior Design)
When senior year began, I didn't know what to expect from our year long senior design project and I never would have guessed that my team would build an autonomous boat, fly to Miami, or win the Francis G. Tatnall Prize. In fact, I didn't even know the teammates I'd be working with or what we would create, but those questions were answered pretty quickly. Within a few days, I found a team and after a couple weeks, we came up with our project idea to build an autonomous boat to survey coral reefs. That's when the engineering began.
If there's one thing I've learned from previous projects, especially Penn Electric Racing, it's that making something always takes longer than you expect, especially if you want it to work reliably. To ensure we would have plenty of testing time and time to iterate on our design, we decided to build a prototype during the second half of the fall semester. This proved to be a good decision, because the prototype taught us a lot about boat design. I mainly worked on the software and electronics, helping with the mechanical design here and there. Initially we planned to control everything with a Jetson TX2, because we hoped to use computer vision for obstacle avoidance and possibly coral analysis. Eventually we decided that it was too big and consumed too much power and there were more important features to focus on. In the end, I created a quick program for remote control using a microcontroller, because it was easier to set up, but the Jetson TX2 and other sensor boards still turned the center of the boat into a mess of wires in the middle of the prototype.

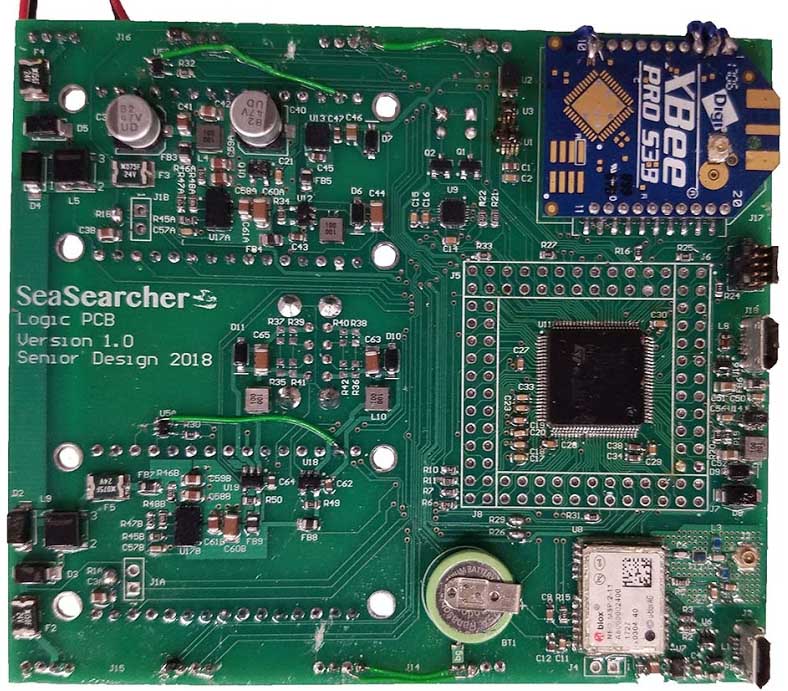
The prototype worked, but was big enough that it was inconvenient to transport, especially for a researcher trying to reach a far away reef. Therefore we decided to focus on shrinking the design while still finding the space for the extra sensors and cameras that hadn't been on the prototype. To avoid the wiring mess on the final version, I decided to design a PCB that included power supplies, USB ports to power the two GoPro cameras, two Wi-Fi modules to control the GoPros, an Xbee, a RTK GPS module, an IMU, battery connectors, a debug serial port, a CAN bus for the depth sensor, a backup coin cell for the clock, waterproof connectors, and a few other circuits. I also designed a RTK base station PCB to send the RTK correction messages to the boat and also relay the data back to the user's computer. It was identical to the previous board, but with the board cut off to the left of the microcontroller.
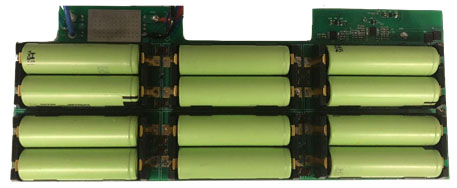
To maximize our battery energy density, we decided to use 18650s and I designed a board to connect and protect those cells. It also had thruster ESCs built in and was loosely based on the power distribution board I had worked on a couple years before on Penn Electric Racing. We made two of this board, giving us a total of 48 cells for around 20km of range.
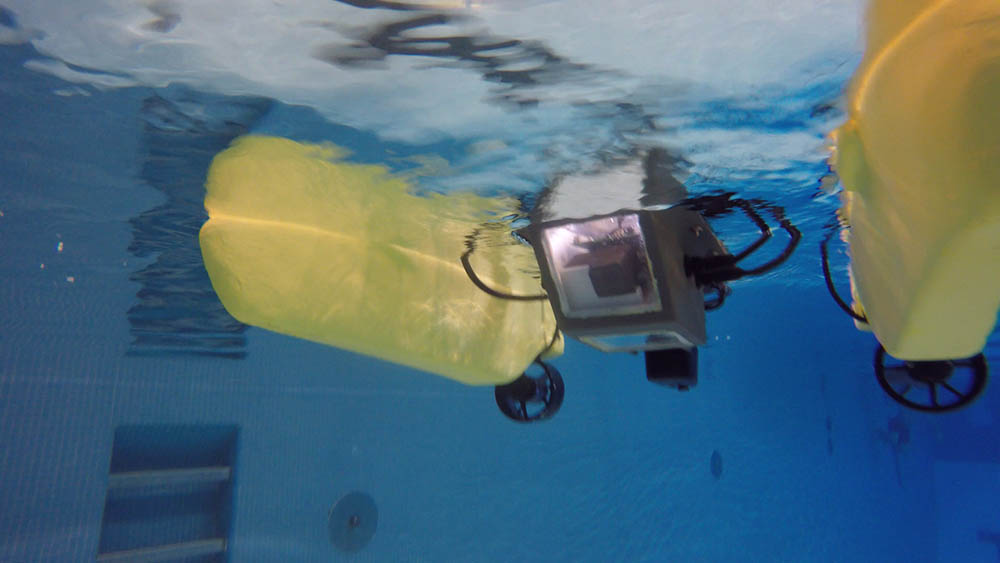
It took a lot of detailed design work to make the design compact and waterproof, because it needed to fit in a suitcase and it was designed to withstand being submerged completely. This video shows how everything fits together in the final design.
Once we'd finalized the design, manufacturing was a major challenge, thanks to the fiberglass layups, 3D printing problems and the need for everything to be IP68 waterproof. I also spent a day teaching everyone how to surface mount solder and assembling all the PCBs. At the same time, I also continued developing firmware for the microcontroller to read all the new sensors and control the PCB. Once that was done, I created an Android app that could wirelessly control it and also developed the following user interface for inputting waypoints.
Once SeaSearcher was working, we started developing the autonomous controller. When it was ready, we went to lake Audrey and tuned it until it could properly go between waypoints. Data from our final test is shown below. It went on to the next waypoint once it was within 5m, although in hindsight we could have made this threshold much smaller.

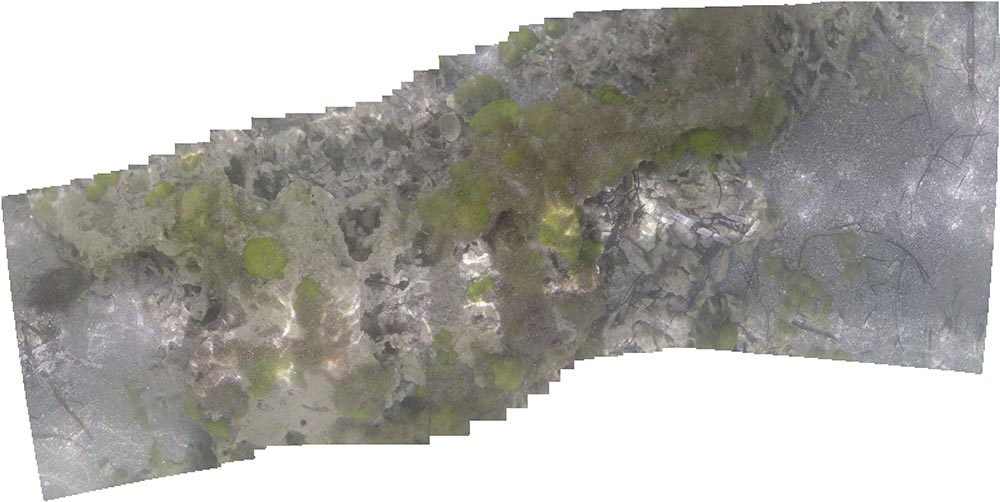
A few days later we presented all our work at senior design day and won the Francis G. Tatnall Prize and advanced to the school wide senior design competition. Before then, we went on a trip to Miami to test SeaSearcher at a real coral reef. Unfortunately, about 10 minutes into testing at the reef the xbee failed because the little u.fl connector wasn't on properly. Our last remaining backup had broken the night before, so we couldn't replace it and had no way to continue testing. Still, we were able to collect some data before it failed.

After going to Miami, we competed in the school wide senior design competition, where we got an honorable mention. We also wrote an 84 page final report that goes into more detail on the project. Overall, I learned a lot and am very proud of what we accomlished`.